
















")

















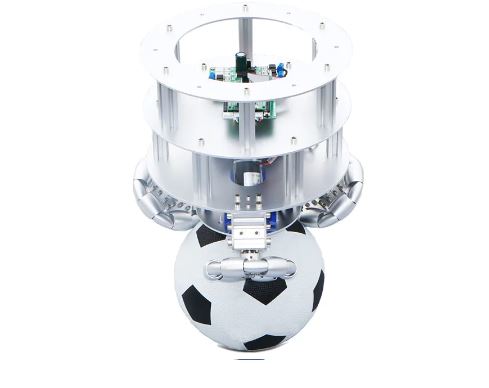
This is the Ballbot: an open source omnidirectional robot that can balance on a soccer ball. It has an aluminum alloy construction and uses a MD36NP27P planetary gear motor with 500-line photoelectric encoder. It has a 0.96-inch OLED display and Bluetooth.
Trending futuristic gadgets & concepts

This robot can move on a variety of terrains. It has a turning radius of almost 0. It has an open source code. It runs on a 24V 5Ah Lithium battery. It uses a STM32F103RCT6 controller.
**Disclaimer: Our posts may feature aff links. As an Amazon Associate, we earn from qualifying purchases. Please read our disclaimer on how we fund this site.













