
































In the past few months, we have covered a bunch of exciting soft robots. Researchers are now exploring the idea of designing robots that can bend and twist to mimic biological movements. Researchers at the Harvard John A. Paulson School of Engineering and Applied Sciences and Wyss Institute for Biologically Inspired Engineering used “mathematical modeling of fluid-powered, fiber-reinforced actuators” to design a robot that bends like an index finger or twists like a thumb.
Currently Trending
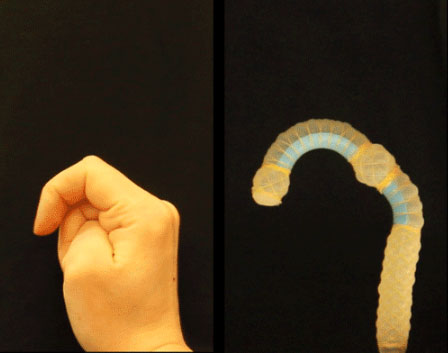
With this approach, it is possible to build wearable robots to assist with motion of a limb. You can find out more on Harvard’s website.
[Source]
**Disclaimer: Our posts may feature aff links. As an Amazon Associate, we earn from qualifying purchases. Please read our disclaimer on how we fund this site.












